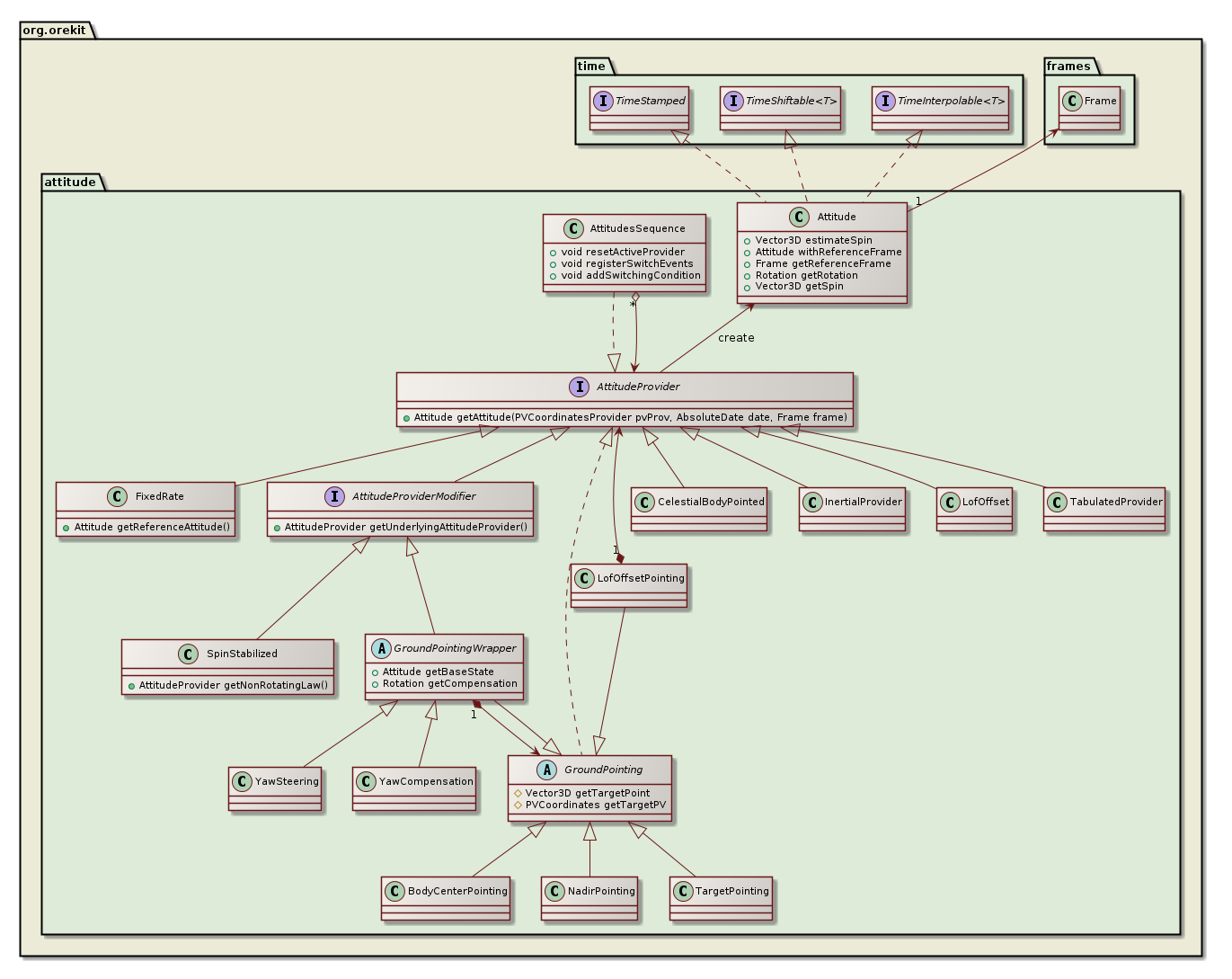
The org.orekit.attitudes package provides classes to represent simple attitudes.
Some force models, such as the atmospheric drag for maneuvers, need to know the spacecraft orientation in an inertial frame. Orekit uses a simple container for Attitude which includes both the geometric part (i.e. rotation) and the kinematic part (i.e. the instant spin axis). The components held by this container allow to convert vectors from inertial frame to spacecraft frame along with their derivatives. This container is similar in spirit to the various extensions of the abstract Orbit class: it represents a state at a specific instant.
In order to represent attitude evolution in time, the AttitudeProvider interface is available. At a higher level, attitude laws defined by a ground pointing law are also available. This corresponds to a real situation where satellite attitude law is defined in order to perform a mission, i.e. pointing a specified point/area. All these laws are collected under an abstract class called “GroundPointing”. Finally, there exist attitude laws that wrap a “base” attitude law, and add to this base attitude law a complementary rotation in order to fulfill specific mission constraints.
InertialProvider, which represents an inertial attitude law, perfectly aligned with the EME2000 frame.
FixedRate, which represents a rotation around a fixed axis at constant rate.
CelestialBodyPointed, i.e satellite pointing axis directed towards given celestial body.
SpinStabilized, which is handled as a wrapper for an underlying non-rotating law. This underlying law is typically an instance of CelestialBodyPointed with the pointing axis equal to the rotation axis, but can in fact be anything…
LofOffset, defined as a given angular offset around three axes from local orbital frame at given date.
TabulatedProvider, defined by interpolating within a user-provided ephemerides, using any number of interpolation points and either using or ignoring the tabulated rotation rates.
These classes are designed to represent attitude laws used to fulfill pointing missions. Several pointing laws are modelized :
BodyCenterPointing, where satellite pointing axis is directed towards reference body frame center.
LofOffsetPointing, defined by a lof offset simple attitude law and completed with ground pointing corresponding functions.
NadirPointing, where satellite pointing axis is aligned on subtrack point vertical direction.
TargetPointing, where satellite pointing axis is directed towards given point on reference body shape.
GroundPointingWrapper, which is an abstract class used for complex pointing laws described herebelow.
All these ground pointing laws are relative to corresponding body frame, which is used for their construction. Depending on their nature, each ground pointing law also have its own specific construction arguments. For each of these laws, satellite attitude state at any time in any given frame can be computed, as well as the observed ground point, or a target in the body frame.
Several classes have been implemented in order to represent attitude laws in which a base attitude law is used, and a complementary rotation is added in order to fulfill specific mission constraints. They are gathered under abstract class GroundPointingWrapper. At this point, implemented laws of this kind are:
YawCompensation: this law is used to fulfill ground observation constraints that reduce geometrical distortion. Yaw angle is changed a little from the basic ground pointing attitude, so that the apparent motion of ground points is along a prescribed axis (orthogonal to the optical sensors rows), taking into account all effects. It is the impact of earth proper rotation on ground points that is compensated.
YawSteering: this law is mainly used for low Earth orbiting satellites with no mission-related constraints on yaw angle. It sets the yaw angle in such a way that the solar arrays have maximal lighting without changing the roll and pitch.
The AttitudeSequence class manages a sequence of different attitude laws activated in rows according to switching events. Only one attitude law in the sequence is in an active state. When one of the switch events associated with the active law occurs, the active law becomes the one specified with the event.
It is possible to have perpetually alternating laws, for example when eclipse entry triggers a switch from a day light attitude to a night attitude and eclipse exit triggers the reverse (possibly with intermediate transition modes).