Overview
OREKIT (ORbits Extrapolation KIT) is a free low-level space dynamics library written in Java.
It provides basic elements (orbits, dates, attitude, frames …) and various algorithms to handle them (conversions, analytical and numerical propagation, pointing …).
Features
-
Time
- high accuracy absolute dates
- time scales (TAI, UTC, UT1, GPS, TT, TCG, TDB, TCB, GMST, GST, GLONASS, QZSS, BDT, IRNSS …)
- transparent handling of leap seconds
- support for CCSDS time code standards
-
Geometry
- frames hierarchy supporting fixed and time-dependent (or telemetry-dependent) frames
- predefined frames (EME2000/J2000, ICRF, GCRF, all ITRF from 1988 to 2014 and intermediate frames, TOD, MOD, GTOD and TOD frames, Veis, topocentric, TEME and PZ-90.11 frames, tnw and qsw local orbital frames, Moon, Sun, planets, solar system barycenter, Earth-Moon barycenter, ecliptic)
- user extensible (used operationally in real time with a set of about 60 frames on several spacecraft)
- transparent handling of IERS Earth Orientation Parameters (for both new CIO-based frames following IERS 2010 conventions and old equinox-based frames)
- transparent handling of JPL DE 4xx (405, 406 and more recent) and INPOP ephemerides
- transforms including kinematic combination effects
- composite transforms reduction and caching for efficiency
- extensible central body shapes models (with predefined spherical and ellipsoidic shapes)
- Cartesian and geodesic coordinates, kinematics
- computation of Dilution Of Precision (DOP) with respect to GNSS constellations
- projection of sensor Field Of View footprint on ground for any FoV shape
-
Spacecraft state
- Cartesian, elliptical Keplerian, circular and equinoctial parameters, with non-Keplerian derivatives if available
- Two-Line Elements
- transparent conversion between all parameters
- automatic binding with frames
- attitude state and derivative
- Jacobians
- mass management
- user-defined associated state (for example battery status, or higher order derivatives, or anything else)
-
Maneuvers
- analytical models for small maneuvers without propagation
- impulse maneuvers for any propagator type
- continuous maneuvers for numerical propagator type
- configurable low thrust maneuver model based on event detectors
- propulsion models intended to be used with maneuver class
- user-friendly interface for the maneuver triggers
-
Propagation
- analytical propagation models
- Kepler
- Eckstein-Heschler
- SDP4/SGP4 with 2006 corrections
- GNSS: GPS, QZSS, Galileo, GLONASS, Beidou, IRNSS and SBAS
- numerical propagators
- central attraction
- gravity models including time-dependent like trends and pulsations (automatic reading of ICGEM (new Eigen models), SHM (old Eigen models), EGM and GRGS gravity field files formats, even compressed)
- atmospheric drag
- third body attraction (with data for Sun, Moon and all solar systems planets)
- radiation pressure with eclipses
- solid tides, with or without solid pole tide
- ocean tides, with or without ocean pole tide
- Earth’s albedo and infrared
- empirical accelerations to account for the unmodeled forces
- general relativity (including Lense-Thirring and De Sitter corrections)
- multiple maneuvers
- state of the art ODE integrators (adaptive stepsize with error control, continuous output, switching functions, G-stop, step normalization …)
- computation of Jacobians with respect to orbital parameters and selected force models parameters
- serialization mechanism to store complete results on persistent storage for later use
- propagation in non-inertial frames (e.g. for Lagrange point halo orbits)
- semi-analytical propagation model (DSST)
- central attraction
- gravity models
- atmospheric drag
- third body attraction
- radiation pressure with eclipses
- computation of Jacobians with respect to orbital parameters and selected force models parameters
- trajectories around Lagragian points using CR3BP model
- tabulated ephemerides
- file based
- memory based
- integration based
- Taylor-algebra (or any other real field) version of most of the above propagators, with all force models, events detection, orbits types, coordinates types and frames allowing high order uncertainties and derivatives computation or very fast Monte-Carlo analyzes
- unified interface above analytical/numerical/tabulated propagators for easy switch from coarse analysis to fine simulation with one line change
- all propagators can manage the time loop by themselves and handle callback functions (called step handlers) from the calling application at each time step.
- step handlers can be called at discrete time at regular time steps, which are independent of propagator time steps
- step handlers can be called with interpolators valid throughout one propagator time step, which can have varying sizes
- step handlers can be switched off completely, when only final state is desired
- special step handlers are provided for a posteriori ephemeris generation: all intermediate results are stored during propagation and provided back to the application which can navigate at will through them, effectively using the propagated orbit as if it was analytical model, even if it really is a numerically propagated one, which is ideal for search and iterative algorithms
- several step handlers can be used simultaneously, so it is possible to have a fine grained fixed time step to log state in a huge file, and have at the same time a coarse grained time step to display progress for user at a more human-friendly rate, this feature can also be used for debugging purpose, by setting up a temporary step handler alongside the operational ones
- handling of discrete events during integration (models changes, G-stop, simple notifications …)
- predefined discrete events
- eclipse (both umbra and penumbra)
- ascending and descending node crossing
- apogee and perigee crossing
- alignment with some body in the orbital plane (with customizable threshold angle)
- angular separation thresholds crossing between spacecraft and a beacon (typically the Sun) as seen from an observer (typically a ground station)
- raising/setting with respect to a ground location (with customizable triggering elevation and ground mask, optionally considering refraction)
- date and on-the-fly resetting countdown
- latitude, longitude, altitude crossing
- latitude, longitude extremum
- elevation extremum
- anomaly, latitude argument, or longitude argument crossings, either true, mean or eccentric
- moving target detection (with optional radius) in spacecraft sensor Field Of View (any shape, with special case for circular)
- spacecraft detection in ground based Field Of View (any shape)
- sensor Field Of View (any shape) overlapping complex geographic zone
- complex geographic zones traversal
- inter-satellites direct view
- ground at night
- impulse maneuvers occurrence
- geomagnetic intensity
- possibility of slightly shifting events in time (for example to switch from solar pointing mode to something else a few minutes before eclipse entry and reverting to solar pointing mode a few minutes after eclipse exit)
- events filtering based on their direction (for example to detect only eclipse entries and not eclipse exits)
- events filtering based on an external enabling function (for example to detect events only during selected orbits and not others)
- events combination with boolean operators
- ability to run several propagators in parallel and manage their states simultaneously throughout propagation
-
Attitude
- extensible attitude evolution models
- predefined laws
- central body related attitude (nadir pointing, center pointing, target pointing, yaw compensation, yaw-steering),
- orbit referenced attitudes (LOF aligned, offset on all axes),
- space referenced attitudes (inertial, celestial body-pointed, spin-stabilized)
- tabulated attitudes, either respective to inertial frame or respective to Local Orbital Frames
- specific law for GNSS satellites: GPS (block IIA, block IIF, block IIF), GLONASS, GALILEO, BEIDOU (GEO, IGSO, MEO)
- loading and writing of CCSDS Attitude Data Messages (both AEM, and APM types are supported, in both KVN and XML formats, standalone or in combined NDM)
-
Orbit determination
- batch least squares fitting
- optimizers choice (Levenberg-Marquardt or Gauss-Newton)
- decomposition algorithms choice (QR, LU, SVD, Cholesky)
- choice between forming normal equations or not
- sequential batch least squares fitting
- sequential Gauss-Newton optimizer
- decomposition algorithms choice (QR, LU, SVD, Cholesky)
- possibility to use an initial covariance matrix
- Kalman filtering
- customizable process noise matrices providers
- time dependent process noise provider
- parameters estimation
- orbital parameters estimation (or only a subset if desired)
- force model parameters estimation (drag coefficients, radiation pressure coefficients, central attraction, maneuver thrust or flow rate)
- measurements parameters estimation (biases, satellite clock offset, station clock offset, station position, pole motion and rate, prime meridian correction and rate, total zenith delay in tropospheric correction)
- can be used with numerical, DSST, or SDP4/SGP4 propagators
- multi-satellites orbit determination
- initial orbit determination methods (Gibbs, Gooding, Lambert and Laplace)
- ground stations displacements due to solid tides
- ground stations displacements due to ocean loading (based on Onsala Space Observatory files in BLQ format)
- several predefined measurements
- range
- range rate (one way and two way)
- turn-around range
- azimuth/elevation
- right ascension/declination
- position-velocity
- position
- inter-satellites range (one way and two way)
- inter-satellites GNSS phase
- GNSS code
- GNSS phase with integer ambiguity resolution and wind-up effect
- multiplexed
- possibility to add custom measurements
- loading of ILRS CRD laser ranging measurements file
- loading and writing of CCSDS Tracking Data Messages (in both KVN and XML formats, standalone or in combined NDM)
- several predefined modifiers
- tropospheric effects
- ionospheric effects
- clock relativistic effects
- station offsets
- biases
- delays
- Antenna Phase Center
- Shapiro relativistic effect
- possibility to add custom measurement modifiers (even for predefined events)
- combination of GNSS measurements
- dual frequency combination of measurements (Geometry-free, Ionosphere-free, Narrow-lane, Wide-lane and Melbourne-Wübbena)
- single frequency combination of measurements (Phase minus code and GRAPHIC)
- possibility to parse CCSDS Tracking Data Message files
- measurements generation
- with measurements feasibility triggered by regular event detectors (ground visibility, ground at night, sunlit satellite, inter satellites direct view, boolean combination…)
- with measurement scheduling as fixed step streams (optionally aligned with round UTC time)
- with measurement scheduling as high rate bursts rest periods (optionally aligned with round UTC time)
- possibility to customize measurement scheduling
-
GNSS
- computation of Dilution Of Precision
- loading of ANTEX antenna models file
- loading of RINEX observation files (version 2 and version 3)
- loading of RINEX navigation files (version 3)
- support for Hatanaka compact RINEX format
- loading of SINEX station file
- loading of RINEX clock files (version 2 and version 3)
- parsing of IGS SSR messages for all constellations (version 1)
- parsing of RTCM messages
- implementation of Ntrip protocol
-
Orbit file handling
- loading of SP3 orbit files (from version a to d)
- loading and writing of CCSDS Orbit Data Messages (both OPM, OEM, OMM and OCM types are supported, in both KVN and XML formats, standalone or in combined NDM)
- loading of SEM and YUMA files for GPS constellation
- exporting of ephemeris in CCSDS OEM file format
- loading of ILRS CPF orbit files
-
Earth models
- atmospheric models (DTM2000, Jacchia-Bowman 2008, NRL MSISE 2000, Harris-Priester and simple exponential models), and Marshall solar Activity Future Estimation, optionally with lift component
- support for CSSI space weather data
- tropospheric delay (modified Saastamoinen, Mendes-Pavlis, Vienna 1, Vienna 3, estimated, fixed)
- tropospheric refraction correction angle (Recommendation ITU-R P.834-7 and Saemundssen’s formula quoted by Meeus)
- tropospheric model for laser ranging (Marini-Murray)
- Klobuchar ionospheric model (including parsing α and β coefficients from University of Bern Astronomical Institute files)
- Global Ionospheric Map model
- NeQuick ionospheric model
- VTEC estimated ionospheric model
- Global Pression and Temperature models (GPT and GPT2)
- geomagnetic field (WMM, IGRF)
- geoid model from any gravity field
- displacement of ground points due to tides
- tessellation of zones of interest as tiles
- sampling of zones of interest as grids of points
-
Customizable data loading
- loading by exploring folders hierarchy on local disk
- loading from explicit lists of files on local disk
- loading from classpath
- loading from network (even through internet proxies)
- support for zip archives
- automatic decompression of gzip compressed (.gz) files upon loading
- automatic decompression of Unix compressed (.Z) files upon loading
- automatic decompression of Hatanaka compressed files upon loading
- plugin mechanism to add filtering like custom decompression algorithms, deciphering or monitoring
- plugin mechanism to delegate loading to user defined database or data access library
- possibility to have different data context (a way to separate sets of EOP, leap seconds, etc)
-
Localized in several languages
- Danish
- English
- French
- Galician
- German
- Greek
- Italian
- Norwegian
- Romanian
- Spanish
-
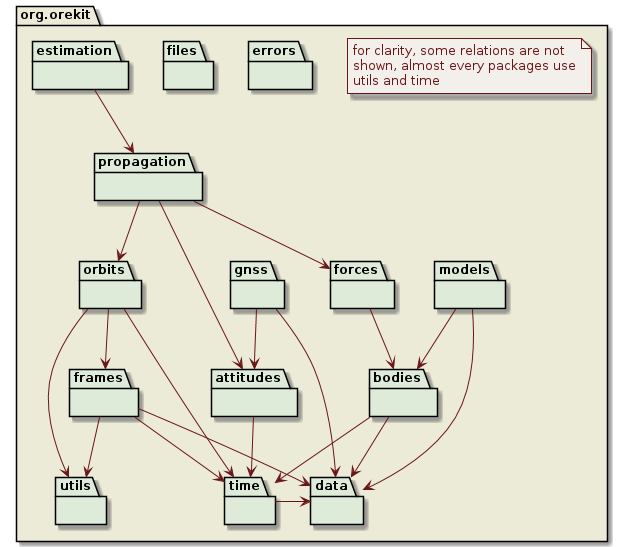
The top level packages provided by Orekit are the following one:
Free software
Orekit is freely available both in source and binary formats, with all related documentation and tests.
It is distributed under the Apache License Version 2.0. This is a well known business-friendly license. This means anybody can use it to build any application, free or not. There are no strings attached to your own code.
Everybody is encouraged to use Orekit as a common low level layer to improve interoperability in space systems.
Maintained library
Orekit has been in development since 2002 inside CS GROUP and is still used and maintained by its experts and an open community. It is ruled by a meritocratic governance model and the Project Management Committee involves actors from industry (CS, Thales Alenia Space, Applied Defense Solutions), research (Naval Research Laboratory), agencies (European Space Operations Centre, European Space Research and Technology Centre) and academics (University at Buffalo, Institut National Supérieur de l’Aéronautique et de l’Espace - Sup’Aéro).
Orekit has already been successfully used during the real time monitoring of the rendez-vous phase between the Automated Transfer Vehicle (ATV) and the International Space Station (ISS) by the Centre National d’Études Spatiales (CNES, the French space agency) and European Space Agency (ESA).
Orekit has been selected in early 2011 by CNES to be the basis of its next generation space flight dynamics systems, including operational systems, study systems and mission analysis systems.
It has been used in numerous studies and for operational systems among the world.
