
The org.orekit.estimation package provides classes to manage orbit determination.
Orbit determination support in Orekit is similar to other space flight dynamics topics support: the library provides the framework with top level interfaces and classical implementations (say distance and angular measurements among others). Some hooks are also provided for expert users who need to supplement the framework with mission-specific features and implementations (say specific delay models for example). The provided objects are sufficient for basic orbit determination and can easily be extended to address more operational needs.
There are two main sub-packages: org.orekit.estimation.measurements and org.orekit.estimation.leastsquares.
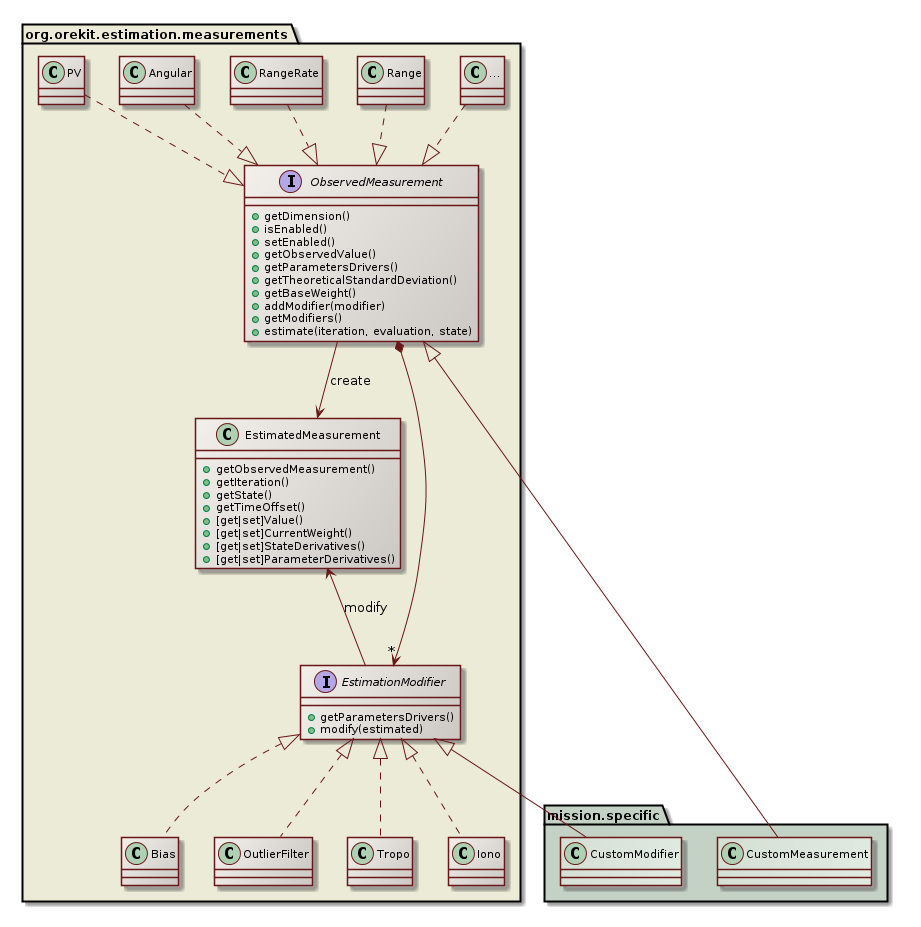
The measurements package defines everything that is related to the measurements themselves, both the theoretical values and the modifications that can be applied to them. All measurements must implement the Measurements interface, which is the public API that the engine will use to deal with all measurements. The most important methods of this interface allow to:
The theoretical evaluations can be modified by registering one or several EvaluationModifier objects. These objects will manage notions like tropospheric delays, biases, ground antennas mounts …
A typical operational case from a ground stations network would create distance and angular measurements, create one bias modifier for the on-board delay for distance measurements, a few modifiers for each ground station (position offset, antenna mount, delay), one modifier for tropospheric delay and add them to corresponding measurements (i.e. all distance measurements would share the same on-board delay object, but distance measurements performed by two difference ground stations would refer to different sets of ground station positions offsets for example).
The classical measurements and modifiers are already provided by Orekit in the same package, but for more advanced needs, users are expected to implement their own implementations. This ensures the extensibility of this design.
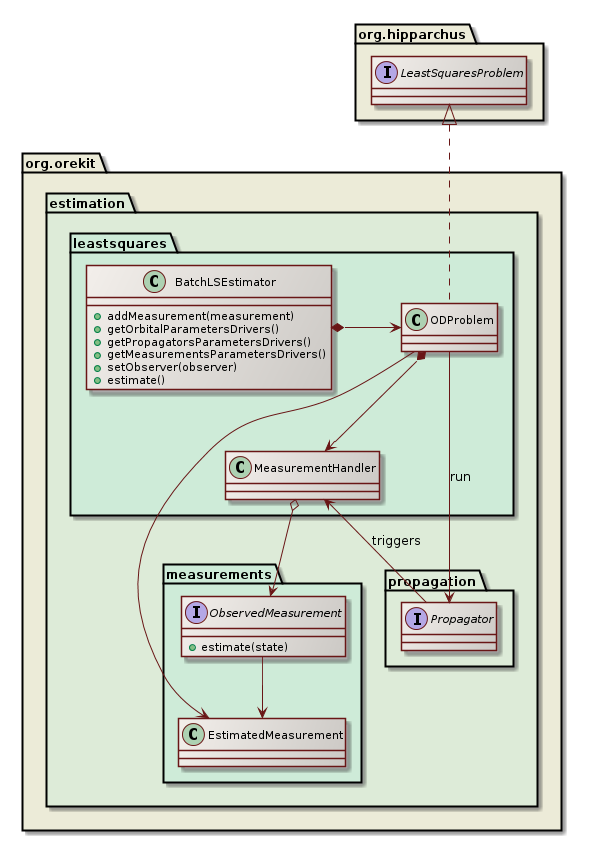
The leastsquares package provides an implementation of a batch least squares estimator engine to perform an orbit determination. Users will typically create one instance of this object, register all observation data as measurements with their included modifiers, and run the least squares filter. At the end of the process, a fully configured propagator is returned, including the estimated orbit as the initial state and the estimated propagator parameters. The estimated measurement and propagator parameters can also be retrieved by themselves.
The BatchLSEstimator class creates an internal implementation of Hipparchus LeastSquaresProblem interface to represent the orbit determination problem and passes it to one of the LeastSquaresOptimizer implementations to solve it. During the resolution, the selected Hipparchus algorithm will call the value method of the local LeastSquaresProblem model at each algorithm test point. This will trigger one orbit propagation with some test values for the orbit state and the parameters (for example biases from the measurements modifiers parameters or drag coefficients from the force models parameters). During the propagation, the Orekit event mechanism is used to collect the state and its Jacobians at measurements dates. A MeasurementsHandler class performs the binding between the generic events handling mechanism and the orbit determination framework. At each measurement date, it gets the state and Jacobians from the propagator side, it calls the measurement methods to get the residuals and the partial derivatives on the measurements side, and it fetches the least squares estimator with the combined values, to be provided back to the Hipparchus algorithm, thus closing the loop.
The orbital state is always estimated. Users can also estimate some propagator and measurements parameters. These parameters are modeled using the Parameter class, which is essentially a key-value pair with multi-dimensional values. The parameters can be flagged as estimated or fixed, and the values can be modified. Each measurement or modifier that support some parameters will create one instance for each parameter. The BatchLSEstimator estimator will retrieve all the parameters and the caller can select the set of parameters that should be estimated for a given run. At each iteration of the least squares solver, the test values for the estimated parameters will be reset.
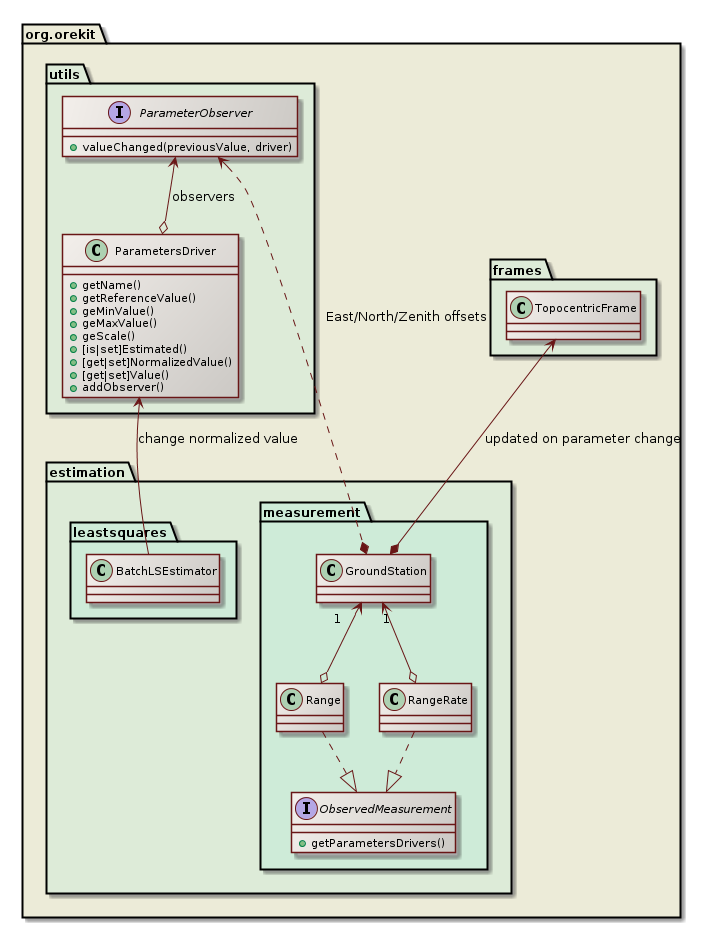
The class diagram above depicts the parameter update mechanism for the case of ground station position offset. The Range and RangeRate measurements classes refer to a GroundStation instance (one instance shared by all measurements using this station) that itself is a 3-dimensional parameter representing the adjustable offset for station position. When station position offset is flagged to be estimated, the BatchLSEstimator will change its value at each iteration. The Range and RangeRate measurements theoretical values will therefore be computed naturally using the updated station position. Other parameters like biases or calibration factors are estimated using the same process.